Netlogo Rescue Übung 4 - Sensoren und Motoren simulieren
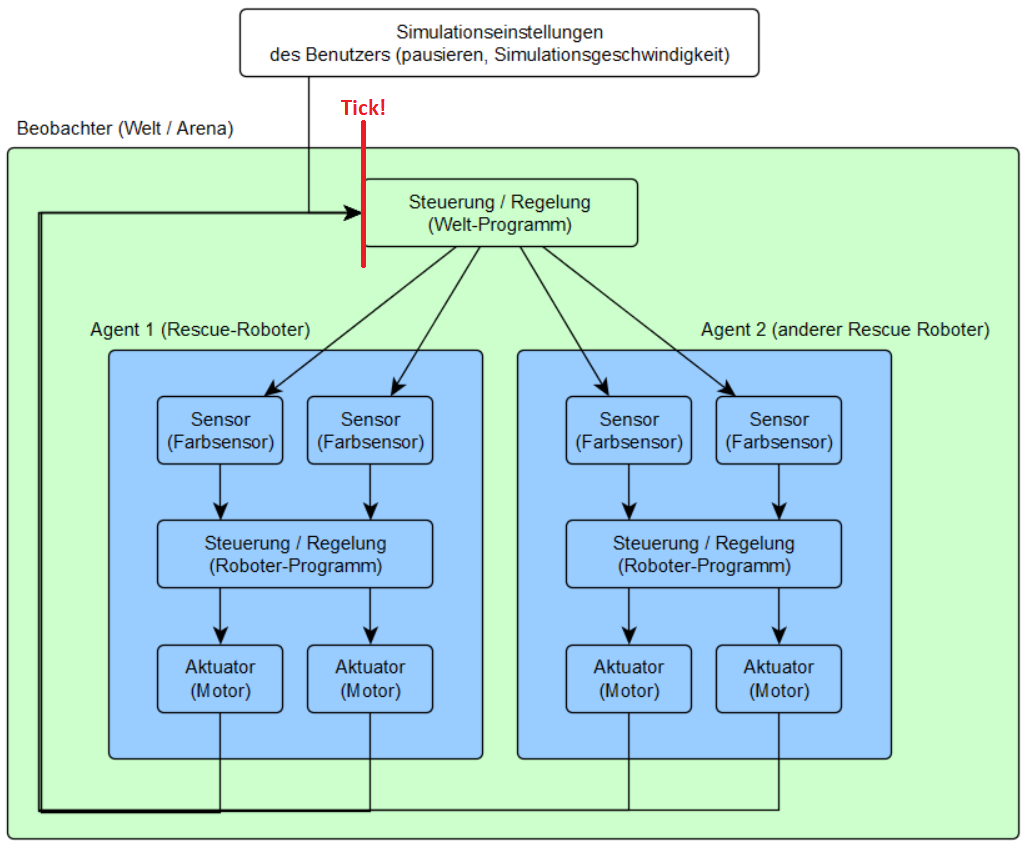
Wie die Simulation funktioniert Die Netlogo Simulationsumgebung simuliert die Welt, in der sich der Roboter bewegt, den Roboter selbst und wie Welt und Roboter miteinander interagieren. Diese Interaktion findet in der Realität über Sensoren und Motoren statt: Sensoren geben eine Information in den Roboter hinein (Eingang). Aktoren (z.B. Motoren) geben eine Information aus dem Roboter heraus (Ausgang). Ein Sensor nutzt ein physikalisches Messprinzip (z.B. eine Fotodiode zum Lichtstärke messen), um eine Eigenschaft der Welt als Messwert dem Roboter zur Verfügung zu stellen. Das Programm des Roboters kann nun darauf reagieren und einen Aktor ansteuern. Der Aktor nutzt ein physikalisches Prinzip (z.B. Elektromagnetismus beim Motor), um die Umgebung zu beeinflussen. Die Art des Aktors und wie dieser vom Roboter-Programm angesteuert wird beeinflusst die Welt (z.B. der Roboter bewegt sich und stößt eine Tee-Tasse um). Diese Veränderung führt wieder zu Veränderungen der von Sen...